
Stoffumwandlungsprozesse, wie sie für die Chemie- und Pharmabranche und die Öl-/Gasverarbeitung charakteristisch sind, sind hochkomplex. Die Erschaffung eines digitalen Zwillings (Bild 1) stellt somit eine große Herausforderung dar. Deterministische Simulationen stoßen schnell an ihre Grenzen. Als gelungene Beispiele gelten die Simulationen von Kläranlagen, wie sie die
Ingenieurgesellschaft Prof. Dr. Sieker (Stoat – Software zur dynamischen Simulation von Kläranlagen, www.sieker.de, 02/2019 ) oder das ifak – Institut für Automation und Kommunikation (simba.ifak.eu, 02/2019) beschreiben. Hierbei werden die einzelnen Behandlungsstufen modelliert und final zu einer Gesamtheit kombiniert.
Viele Einflussfaktoren
Bei stoffumwandelnden Prozessen ist nicht nur die Anzahl der Einflussfaktoren relativ hoch, sondern auch deren Kontinuität unsicher: In einem Reaktor beispielsweise müssen Parameter nicht gleichverteilt sein, ebenso können sich die einwirkenden Triebkräfte während des Ablaufs ändern. Dadurch können Prozesse in ihrem zeitlichen Verlauf variieren bzw. von einer vereinfachten Simulation signifikant abweichen. Weiterhin sind moderne stoffumwandelnde Prozesse durch eine Vielzahl von Prozessstufen sowie deren Verknüpfungen (z. B. Parallelstränge und Rückführschleifen) gekennzeichnet.
In der Literatur findet man parziell noch den Ansatz, eine dynamische Simulation mittels Differenzialgleichungen durchzuführen. Hierbei stößt die Größe der Modellgleichungen und ihre Anzahl (besonders bei komplexen Systemen) ebenso an Grenzen wie die erforderliche Rechnerleistung.
Eine praktikable Erfassung einer derartigen systemischen Komplexität kann gelingen, wenn man ein Modell des Prozesses auf Basis von Triebkraft-Gleichungen erstellt, den Prozessablauf in viele zeitdiskrete Abschnitte oder bei Bedarf in örtlich diskrete Bereiche des Prozessraums aufteilt. Letzteres Vorgehen empfiehlt sich vor allem bei langen Konti-Prozessen. Die Arbeitsschritte für ein derartiges Modell könnten wie folgt aussehen:
- Festlegung des Prozessumfangs, seiner Grenzen und Schnittstellen (Mengen, Parameter, Energien usw.) sowie der Start-Parameter
- Ermittlung des normalen und der abweichenden Prozessabläufe (z. B. bei Parameterabweichungen, Störungen, Betriebspunktänderungen)
- Zuweisung der zugrundeliegenden Triebkraft-Gleichungen (ggf. in Abhängigkeit von anderen Parametern)
- Abschätzung der maximal möglichen Änderungsgeschwindigkeiten als Basis für die Zeit-Diskretisierung (Zeitsprung)
- Modellierung des Prozessverlaufs ab Start bis Ende des ersten Zeitsprungs und Fixierung der neuen Parameter
- Prüfung, welche Modellgleichungen bei den neuen Parametern relevant sind
- Modellierung des Prozessverlaufs für den nächsten Zeitsprung usw. fortführend
Batch- und Konti-Verfahren
Die zeitliche Betrachtung derartiger Prozesse zeigt, dass zwischen kontinuierlichen und diskontinuierlichen Prozessen signifikante Unterschiede bestehen. Bei Konti-Abläufen besitzt jede Teilmenge eines Rohstoffes einen anderen Status als die benachbarten Teilmengen, da alle Teilmengen in einer Art Pfropfenströmung die Prozessanlage durchlaufen. Bei diskontinuierlichen Prozessen (ab hier: Batch) haben viele Teilmengen (je nach Größe der Prozessapparate) den gleichen Zustand, wenn man eine Gleichverteilung im jeweiligen Apparat annimmt. Entsprechend ist die Methodik der o. g.
Arbeitsschritte zu variieren.
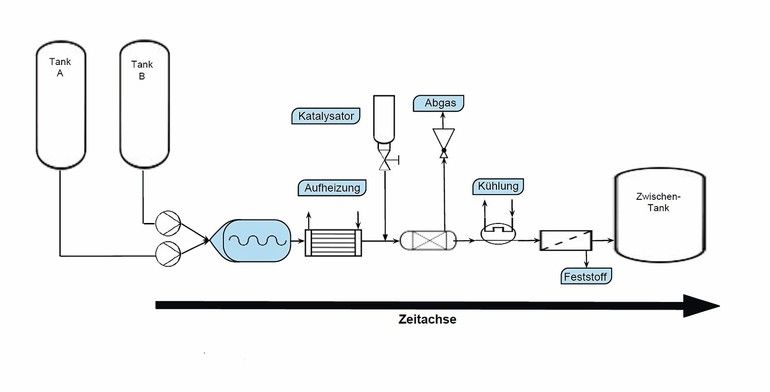
Konti-Prozesse erscheinen einfacher zu handhaben: Beim Durchlaufen der Prozessanlage erfährt jede Teilmenge Veränderungen, die durch die an der Anlage von außen wirkenden Einflüsse hervorgerufen werden (z. B. Aufheizen, Einbringen von Reaktionspartnern, Absaugung von Komponenten). Entsprechend ist sowohl die zeitliche Wanderung einer Teilmenge in der Anlage zu betrachten, aber parallel auch die genannten Einflüsse bzw. Veränderungen zu genau diesem betrachteten Zeitpunkt. Prinzipiell sind die Übergänge von einer Grundoperation (ab hier: GOP) zur nächsten für jede Teilmenge fließend. Die jeweiligen Anlagenteile behalten im Normalbetrieb ihre jeweiligen Parameter und Wirkfunktionen (Bild 2). Demzufolge bietet sich für Konti-Prozesse die zeitliche Modellierung einer repräsentativen Teilmenge an.
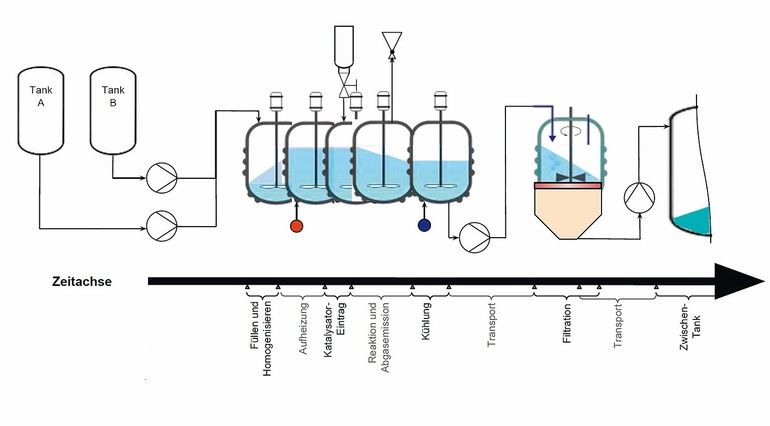
Bei Batch-Prozessen treten die Teilmengen anfangs in die erste GOP ein, erfahren hier eine Veränderung (bzgl. Parametern, Komponenten, Stöchiometrie usw.). Hierbei ändern sich die Parameter der jeweiligen Prozessanlage in vielen Fällen. Mehr noch: oft wird eine Anlage zur Durchführung mehrerer GOP eingesetzt (z. B. in der zeitlichen Abfolge: Mischung von Komponenten, Aufheizen, Stoffumwandlung, Abdestillieren/Eindampfen) wie in Bild 3 dargestellt. Nach Abschluss der gewollten GOPs gelangen die Teilmengen mittels Transport, z. B. durch Gravitation, Druck oder Pumpvorgang, in die nächste Verarbeitung, die dann erfolgt. Resultierend scheint für Batch-Prozesse die zeitliche Betrachtung anhand der jeweiligen Prozessanlagen zielführend.
Simulation eines Batch-Prozesses
Für den Start einer Simulation sind folgende Daten erforderlich:
- Prozessvorgaben in Form einer Verfahrensbeschreibung
- Struktur der technischen Anlage, oft bis zu den Details
- Stoffdaten bzgl. Reaktionsverhalten, thermodynamischer und anderer Werte
- Gleichungen für die verändernden Triebkräfte
- Der erwartete Zeitsprung, d. h. eine Modellierung alle 5 s, alle 15 s oder in längerem Zeitabstand.
Bei Batch-Prozessen ist die Bilanzgrenze der Betrachtung ebenfalls von Bedeutung. Es empfiehlt sich, die Prozessbeschreibung mit der eigentlichen Simulation zu verbinden und in einer geeigneten Software-Oberfläche gemeinsam darzustellen.
Als Beispiel soll ein einfacher Batch-Prozess simuliert werden, der die Schritte Einfüllen der Komponenten, Durchmischung, Aufheizung und Reaktion umfasst. Das betrachtete System ist Bild 3 zu entnehmen. Basierend auf den o. g. Simulationsdaten können die zeitabhängigen Parameter berechnet werden. Wie in realen Prozessen soll eine Störung zum Zeitpunkt t = 600 s auftreten; diese wird von der Steuerung erkannt; der Prozessverlauf wird entsprechend angepasst.
Die Darstellung der Simulation kann variieren bezüglich
- der Komplexität des jeweiligen Prozesses (z. B. die Anzahl der Parameter)
- der Detailliertheit der Betrachtung (z. B. wenn keine Gleichverteilung vorliegt);
- Rücksprüngen und Schleifen im Prozessverlauf (z. B. durch Mutterlauge)
Die dargestellte Herangehensweise kann
bereits im Planungsstadium eines Prozesses angewandt werden und – wie im Beispiel sichtbar – nicht nur den normalen Prozessverlauf, sondern auch Störungen sowie An- und Abfahrprozesse beschreiben. Hierfür ist eine genaue Kenntnis bzw. Darstellung dieser Abläufe erforderlich; diese kann intuitiv erfasst oder mittels Risikoanalyse ermittelt werden. Für einen real laufenden Prozess empfiehlt sich die Implementierung der gewonnenen Erkenntnisse in die Steuerungs-Software in dem Sinn, dass bei Erkennung einer Abweichung bzw. bei Erreichen von definierten Zuständen die (vorprogrammierte) automatische Reaktion im System ausgelöst wird. Diese Vorgehensweise erfordert die Zusammenarbeit der Verfahrensplaner sowohl mit den Prozessentwicklern als auch den Prozessbetreibern und den Regelungstechnikern. Mit dieser Methodik kann der Automatisierungsumfang eines Prozesses wesentlich erhöht werden und darüber hinaus lassen sich ungewollte Systemzustände vorausschauend bewältigen.
Suchwort: cav0619ebert

Autor: Bernd Ebert
Freier Autor








