

Der Trend zu kleinen, flexiblen Verpackungseinheiten fördert den Einsatz multifunktionaler Roboter statt spezieller Sondermaschinen. Der Robotereinsatz ist umso interessanter, je vielfältiger die Pack- und Palettieraufgabe ist. Moderne Robotersysteme verarbeiten das Packgut in Lagen, in Reihen oder Stück für Stück. Schwierigste Kommissionieraufgaben oder Palettierschemen sind ohne aufwändige Gruppierstation möglich. Der Roboter arbeitet mit höchster Präzision, baut kompakt und ist zudem mechanisch unkompliziert.
Wolfgang Huber, Peter Graf
Die für einen Pack- oder Palettierroboter notwendige Pheripherie schränkt allerdings die theoretisch mögliche Leistung ein. Höhere Beschleunigungen erlauben nur einfache Fahrkurven mit unempfindlichem Ladegut. Im Hochleistungsbereich ist die konventionelle Maschinentechnik mit ganzlagiger Verarbeitung daher weiterhin als Alternative zur Robotertechnik interessant. Vom Investitionsvolumen ist der Roboter im Vergleich zum klassischen Aggregat auch dann erst attraktiv, wenn er multifunktional arbeitet. Beim Palettieren können diese Zusatzfunktionen z. B. „Paletten stapeln“ oder „Zwischenlagen auflegen“ sein.
Aus den drei kartesischen Koordinaten X, Y und Z sowie den drei Orientierungswinkeln A, B und C ergeben sich die sechs Freiheitsgrade eines 6-achsigen Industrieroboters. Roboter mit drei oder vier Achsen verfügen nicht über alle sechs Freiheitsgrade und sind daher in der Bewegungsfreiheit eingeschränkt. Das betrifft in der Regel die Orientierungswinkel. Häufig reichen für eine bestimmte Aufgabenstellung jedoch weniger als sechs Achsen aus. Dazu wird die Zahl der Handachsen verringert, was natürlich auch die Anschaffungskosten reduziert – jeder Freiheitsgrad kostet Geld. In den letzten Jahren ist ein Trend zu den drei Bauarten Portal, Knickarm und Scara festzustellen.
Merkmale der drei Bauarten
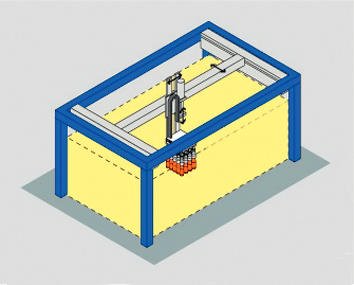
Portalroboter sind als 2-, 3- oder 4-Achssystem mit unterschiedlichen Achslängen lieferbar. In Abhängigkeit von der Achslänge variieren die maximalen Traglasten. Gewöhnlich arbeitet ein Portalroboter mit drei Linearachsen. Diese stehen rechtwinklig zueinander. Sie bilden ein dreidimensionales, kartesisches Koordinatensystem mit X-, Y- und Z-Achse. Aufgrund seiner senkrecht zueinander angeordneten Achsen deckt der Portalroboter einen quaderförmigen Arbeitsbereich ab. In diesem Arbeitsbereich kann er an jeden Punkt fahren. Er steht sich nicht selbst im Weg, wie dies bei Gelenkarmrobotern der Fall ist. Mit modernen Antriebssystemen sind kartesische Roboter sehr schnell und präzise. Zudem bauen sie kleiner als ihre herkömmlich angetriebenen Vorgänger.
Der Knickarmroboter ist aus vier oder sechs Achsen aufgebaut. Eine davon fungiert als Haupt-Drehachse. Auf dieser setzen die anderen Bewegungsachsen auf. Aus den Längen der Verfahrachsen beziehungsweise den maximalen Dreh- und Knickwinkeln oder Armlängen leitet sich der Arbeitsbereich des Systems ab. Innerhalb des Arbeitsbereichs gibt es einen Ausschließungsbereich, bis zu dem der Greiferpunkt an die Roboterstruktur heranfahren kann. Dieser Bereich ist durch den Roboter selbst beziehungsweise seine Kontur gegeben. Den Knickarmroboter charakterisiert daher ein nierenförmiger Arbeitsbereich.
Der Scara-Roboter (Selective Compliance Assembly Robot Arm) wird auch als horizontaler Knickarmroboter bezeichnet. Er ähnelt vom Aufbau dem menschlichen Arm. Am Ende des Armes befindet sich eine Z-Achse. Diese lässt sich unabhängig zur senkrechten Bewegung drehen. Scara-Roboter sind speziell für Pick-and-Place-Anwendungen geeignet. Die extrem hohen Geschwindigkeiten und Beschleunigungen helfen dem Anwender, in seinen Applikationen sehr kurze Zykluszeiten und schnelle Abläufe zu realisieren. Damit wird eine hohe Stundenleistung erreicht.
Grundsätzlich ist ein Roboter mit Servoantrieben ausgestattet und verfügt über eine Positioniersteuerung. Der Roboter ist daher in der Lage, definierte Bahnkurven abzufahren. Aus den Besonderheiten des Robotereinsatzes leiten sich spezielle Anforderungen an den Roboterantrieb ab: Dieser muss klein, als mitbewegte Masse leicht und für das häufige Beschleunigen sowie die hohen Verfahrgeschwindigkeiten hochdynamisch sein.
Scara-Pack- und Palettierroboter
Die nach dem Scara-Prinzip konstruierten Pack- und Palettierroboter verarbeiten Kästen, Kartons und Trays, aber auch einzelne Behälter und können dank ihrer modularen Bauweise unterschiedlichste Aufgaben erfüllen. Die Schwenkarmroboter basieren auf dem Einsäulenprinzip mit je einer Arbeitsfunktion in maximal vier Bewegungsachsen. 3-achsige Roboter eignen sich für ganzlagige Verarbeitung. Sie verfügen über einen Schwenkradius von 220 °. Mit einem Schwenkarmroboter mit drei Bewegungsachsen ist darüber hinaus auch das Be- und Entpalettieren von Verbundschemen möglich, da der Greiferkopf um zweimal 180 ° gedreht werden kann. Die Tragkraft des Roboters beträgt dabei bis zu 500 kg.
4-achsige Scara-Roboter verarbeiten Mehrweg- und Einweggebinde reihenweise beziehungsweise Stück für Stück. Aufgrund der vielen Achsen zeichnet sich die Maschine durch eine große Flexibilität bei der Projektierung aus. Ihre Tragkraft ist meist auf 180 kg beschränkt. Linearroboter kommen für die ganzlagige und reihenweise Verarbeitung von Mehrweg- oder Einweggebinden zum Einsatz. Ein Linearroboter mit zwei Bewegungsachsen eignet sich vor allem für das Ein- und Auspacken sowie das lagenweise Palettieren. Die Tragkraft des Linearroboters beträgt 520 kg. Die drei Robotertypen leisten jeweils bis zu 500 Takte/h.
Greifsystene in breiter Auswahl
Der Greiferkopf ist an einem Greiferkopfträger mit einem zentralen Verschluss befestigt. Das Greifprinzip wird an den Behälter und das Lagenbild angepasst, damit mechanische Greifer, Sauger oder Kombinationen davon die Packstücke sicher und schonend aufnehmen. Für Palettierer sind zahlreiche Greifsysteme möglich. An 2- und 3-achsigen Robotern und Linearrobotern sind für die ganzlagige Verarbeitung Haken-, Klemmgreifer- oder Spezialgreiferköpfe für Kästen mit übergreifender Zentrierung beziehungsweise ganzlagige Leisten-/Ringgreiferköpfe montiert.
4-achsige Roboter mit reihenweiser oder einzelner Verarbeitung werden mit Gabelgreiferköpfen für Trays, Kartons und Säcke, Parallelklemmgreifer für geschrumpfte Gebinde oder Kartons, Packgarnituren, Sauggreifern für leichte, glatte Gebinde oder Säcke, Hakengreifern für reihenweise Verarbeitung und eventuell mit Spezialgreiferköpfen ausgestattet.
Der Jalousiegreiferkopf palettiert druckempfindliche Einwegwaren wie Schrumpfgebinde oder Kartonagen schonend in ganzen Lagen. Eine Gruppierstation bereitet bei diesem System die Lage vor. Der Reihenschieber schiebt die Lage anschließend in den Greiferkopf. Dort wird sie durch einen Rollenteppich und seitlich angebrachte Zentriergeländer gehalten. Um die Lage abzusetzen, öffnet sich der Rollenteppich nach beiden Seiten.
Zum kombinierten Be- und Entladen von Kunststoffkästen eignet sich ein Klemmgreiferkopf mit Hakenunterstützung. Für das Entladen des Leerguts werden die Klemmbalken eingesetzt, beim Beladen der gefüllten Kästen halten Haken das zusätzliche Gewicht. Mit einem Kombigreiferkopf können zum Beispiel Trays durch seitlich angeordnete Klemmbalken aufgenommen und auf eine Palette gesetzt werden. Das gleiche Greifwerkzeug nimmt Flaschen mit Packtulpen vom Band und stellt sie auf die Trays. Dabei sind die Packtulpen im Greiferkopf horizontal zu verschieben. Das garantiert das exakte Einsetzen der Flaschen. Andere Multifunktionswerkzeuge gestatten beispielsweise das kombinierte Palettieren und Einsetzen von Zwischenlagen.
Vertikalknickarmroboter
Vertikalknickarmroboter lösen die unterschiedlichsten Pack- und Palettieraufgaben. Sie lassen sich problemlos in jede Anlage integrieren und verarbeiten Kästen, Kartons, Trays, Fässer, Säcke und einzelne Behälter mit höchster Präzision. Die Typen leisten je nach Anforderung mit vier Achsen bis zu 700 Takte/h und mit 6-Achsen 450 Takte/h. Sie können eine Traglast von maximal 450 kg beziehungsweise 600 kg bewegen. Knickarmroboter eignen sich besonders für die reihenweise oder lagenweise Verarbeitung von Behältern und Gebinden sowie für kombinierte Anwendungen. Innerhalb ihres großen Arbeitsbereichs erreichen sie jeden beliebigen Aufnahme- und Absetzpunkt.
Der Roboterarm ist auf einem stabilen Sockel gelagert. Er ist in beide Richtungen um 180 ° zu drehen. Die Bewegungen aller rotatorischen Achsen erfolgen über spielfreie Getriebe mit direkt angebauten Servomotoren. Dieser Antrieb garantiert sehr präzise Bewegungsabläufe und ein schonendes Anfahr- und Abbremsverhalten. Die wartungsfreien Servoantriebe arbeiten geräuscharm und erreichen hohe Positionier- und Wiederholgenauigkeiten von ±0,5 mm.
cav 499
Krones Pack- und Palettierroboter
Brau Beviale 2007
Unsere Webinar-Empfehlung

Der Webcast MTP und modulare Produktion bietet eine einzigartige Gelegenheit, mehr über die aktuellen Entwicklungen bei MTP und in der modularen Produktion zu erfahren.
Chemie- und Pharmaproduktion braucht mehr Flexibilität
In der heutigen sich schnell wandelnden Welt stehen…
Teilen:







