

Cubic-S steht für intelligente Sicherheit in der roboterbasierten Automation. Supervice, Safety, Smart – Überwachen, Sicherheit und Klugheit – sind die Schlagworte. Mit der Sicherheitsfunktion des Roboters ist es möglich, neue Zellenkonzepte zu realisieren und Mensch und Maschine in den Dialog zu setzen.
Das Sicherheitskonzept Cubic-S von Kawasaki Robotics besteht aus einer separaten Rechnereinheit, die im Controller integriert ist. Grundsätzlich können acht unterschiedliche Funktionen abgerufen und zur Kontrolle und Steuerung eingesetzt werden: Überwachung der Arbeitsbereiche sowie der Achsen des Roboters, Geschwindigkeitsüberwachung, Stillstandüberwachung, Überwachung der Werkzeugorientierung, Not-Halt-Funktion in den Stoppkategorien 0 bis 2, Not-Aus-Funktion in den Stoppkategorien 0 und 1 sowie Ausgabe der Sicherheitszustände aller beschriebenen Funktionen von Cubic-S oder der Zustände der Sicherheitseingänge.
Für die Automatisierung mit Kawasaki-Robotern bedeutet dies, dass kleinere Roboterzellen realisierbar sind, die sich rein auf die programmierte Roboterbewegung beschränken und den möglichen Arbeitsbereich des Roboters nicht berücksichtigen müssen. Der Roboter wird hierbei in sicherer Technik in seiner Bewegung so eingeschränkt, dass Arbeitsbereiche außerhalb des aufgabenbedingten Bereichs vom Roboter nicht erreichbar sind. Selbst bei einer Fehlprogrammierung schaltet der Roboter durch die permanente Überwachung seiner Bewegungen sofort bei Erreichen eines verbotenen Bereichs ab.
Zwei Sicherheitszonen
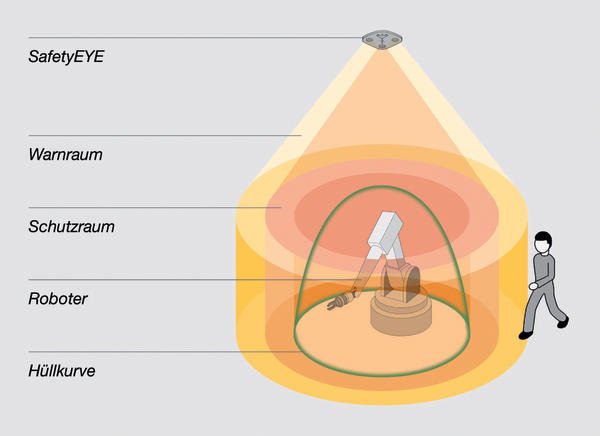
Eine Mensch-Maschine-Interaktion wird möglich durch die permanente Überwachung der Geschwindigkeiten und die Kopplung mit passender Sicherheitstechnik, z. B. Lichtgitter, die in das Cubic-S-Modul integriert werden. Durch die Kopplung mit dem Kamerasystem Safety-EYE von Pilz kann sogar gänzlich auf die Anbringung eines Schutzzauns verzichtet werden. Das Kamerasystem wird über dem Roboter montiert und bildet zwei unsichtbare Sicherheitszonen. Diese Zonen sind je nach Anwendung und Roboter individuell programmierbar. Betritt ein Werker die erste Zone, den sogenannten „Warnraum“, so wird diese Verletzung des Sicherheitsbereichs an das Cubic-S-Modul weitergeleitet und dort entsprechend ausgewertet. Cubic-S reduziert daraufhin die Geschwindigkeit des Roboters auf Einrichtgeschwindigkeit. Dies bedeutet, dass der Roboter mit einer maximalen Geschwindigkeit von 250 mm/s betrieben werden kann. Überwacht werden entweder die Flanschgeschwindigkeit, der TCP oder frei definierte Punkte im Werkzeug. So kann je nach Bedarf und möglicher Gefährdung die Überwachung individuell angepasst werden. Bei Betreten der zweiten Zone, dem „Schutzraum“, stoppt der Roboter automatisch und geht in einen definierten Not-Halt, sodass zu keiner Zeit eine Personengefährdung entstehen kann.
Sicherheit in 3-D
Das Kamerasystem SafetyEYE ist eine Sicherheitstechnologie für die Raumüberwachung. Dabei kombiniert das System intelligente Sensorik mit effektiver Steuerung. Wo früher aufwendig mehrere Sensoren aufeinander abgestimmt und ausgerichtet sowie mit Steuerungstechnik verdrahtet und in Betrieb genommen werden mussten, ermöglichen 3-D-Technik und eine bedienerfreundliche Software das Steuern komplexer Anwendungen mit nur einem System. Mit dem SafetyEYE-Configurator lassen sich Schutzzonen einfach und schnell am PC konfigurieren. Das sichere Kamerasystem bietet die Möglichkeit, ohne mechanische Einschränkungen zu arbeiten. Gefahr bringende Arbeitsprozesse werden aus der Vogelperspektive überwacht und gesteuert. Das Gesamtsystem besteht aus einer Sensoreinheit und einer Auswerteeinheit. Die Sensoreinheit wird über dem zu überwachenden Bereich installiert und ersetzt herkömmliche Schutzeinrichtungen. Kombiniert mit der im Kawasaki-Controller integrierten Hardwareeinheit Cubic-S ergibt sich ein modernes Sicherheitskonzept.
Mobile Roboterzelle
Verschiedenste Konzepte zum Bau von Roboterzellen können mithilfe des Cubic-S und des SafetyEYE realisiert werden, z. B. der Aufbau einer mobilen Roboterzelle zur Maschinenbestückung oder Palettierung. Der Roboter trägt so seinen unsichtbaren Schutzzaun immer mit sich. Dadurch wird das Umsetzen der gesamten Arbeitszelle zwischen verschiedenen Anlagen deutlich einfacher und der Zeitverlust minimiert. Kombinierte Bereiche, die regelmäßig von Personen passiert werden müssen, sind in das Zellenkonzept integrierbar. Sei es, um benachbarte Bereiche zu begehen oder um Anlagenbereiche zu be- oder zu entladen. Die Interaktion und die Möglichkeit des dynamischen Eingriffs eines Werkers in den Prozess, ohne ihn zwingend zu stoppen, ermöglichen völlig neue Konzepte und Prozesse, die zuvor nicht oder nur schwer automatisierbar erschienen.
prozesstechnik-online.de/dei0512405
Teilen:







